Mechanisms and Computational Design of Multi-Modal End-Effector with Force Sensing using Gated Networks
Yusuke Tanaka*, Alvin Zhu*, Richard Lin, Ankur Mehta, and Dennis Hong
* denotes co-first authorship
Presented at ICRA 2025

Example of gripping mechanism with force prediction and disturbance rejection using gated networks
Overview
This research paper presents MAGPIE, a multi-modal end-effector designed for limbed robotics, capable of transitioning between flat and line foot configurations while providing grasping capabilities. Central to its design is an 8-axis force sensing system powered by a Gated Network-based force estimation framework, which enhances the accuracy of tactile and contact force measurements. This framework leverages a computational design approach to optimize sensor placement and mitigate noise and interference, ensuring high sensitivity and robustness under varying conditions. MAGPIE integrates these capabilities with its hardware design, enabling precise force sensing and dynamic adaptability.

Computational design framework for the hall effect-based multi-axis force sensing overview
The computational design framework for the Hall-effect-based multi-axis force sensing in MAGPIE provides an optimized approach to designing high-performance tactile sensing mechanisms. This framework simulates sensor responses to external forces, taking into account non-linearities, noise, and interference, to achieve desired force ranges and sensitivities. By leveraging Gaussian radial basis functions (GRBFs) and integrating data-driven models like stacked Gated Recurrent Units (GRUs), the framework enables accurate inverse models for force estimation. It also incorporates real-world uncertainties such as sensor misalignment and magnetic field disturbances to refine sensor performance. This approach ensures robust, multi-axis force sensing for MAGPIE's dual role as a gripper and foot, supporting both locomotion and manipulation tasks in dynamic environments.
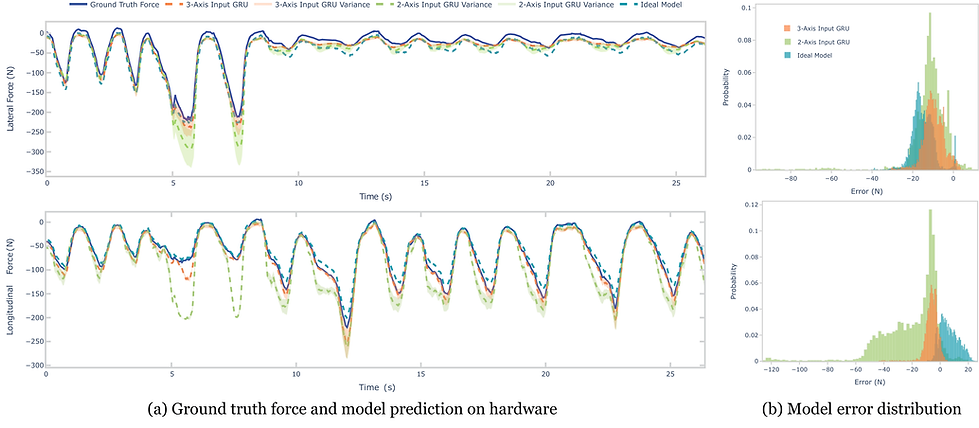
We can see the performance of the force estimation models for MAGPIE’s Hall-effect-based multi-axis sensing system, comparing ground truth forces with predictions from the ideal model, 2-axis GRU, and 3-axis GRU models. The results highlight the superior accuracy of the 3-axis GRU, which effectively handles coupled axis interactions and achieves lower root mean square error (RMSE) compared to the other models. The ideal model, while computationally efficient, underestimates forces at higher amplitudes due to its inability to account for axis coupling. The 2-axis GRU struggles in scenarios with significant deviations on multiple axes, leading to higher estimation errors. In contrast, the 3-axis GRU provides more reliable predictions and incorporates uncertainty estimates to detect abnormal operating conditions, such as external magnetic field disturbances. Overall, the 3-axis GRU demonstrates robust performance, offering precise force estimation essential for MAGPIE’s multi-modal functionality.
The ground truth, the ideal model, and the stacked GRU with 2-axis and 3-axis inputs for comparison
Citation
If you use this work or find it helpful, please consider citing: (bibtex)
@misc{tanaka2024mechanismscomputationaldesignmultimodal,
title={Mechanisms and Computational Design of Multi-Modal End-Effector with Force Sensing using Gated Networks},
author={Yusuke Tanaka and Alvin Zhu and Richard Lin and Ankur Mehta and Dennis Hong},
year={2024},
eprint={2410.17524},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2410.17524},
}